
Űrkutatás
A HOLDON TÖRTÉNŐ MUNKAVÉGZÉS ELŐSEGÍTÉSÉRE KONSTRUÁLT ROBOTTECHNIKA GYAKORLATI MEGVALÓSÍTÁSA
Jelen projektünk célja:
A holdon történő munkavégzés gyakorlati megvalósítása a holdi körülmények ismeretében. A birtokunkban lévő innovációk és az abból hasznosítható technológiák felhasználása a robot konstrukciónkban.
A robot elnevezése:
„MATCI” Moon Ant Technology Construction Instrument. A robot elnevezése jól tükrözi a szélsőséges holdi terepviszonyokhoz igazított igénybevételt.
A robot működéséhez szükséges alapelvek:
A földi és holdi gravitációközti 1/6-os különbségből adódóan, a robot munkavégző képessége a hatodára csökken. A gravitációból adódó problémát kiküszöböltük a robot tömegének önsúlyozásával, így a munkavégzésnek elegendő toló illetve húzó erő érhető el. Az alapelveink alapján megalkotott modellezések során, jutottunk a jelen konstrukcióhoz és formához:
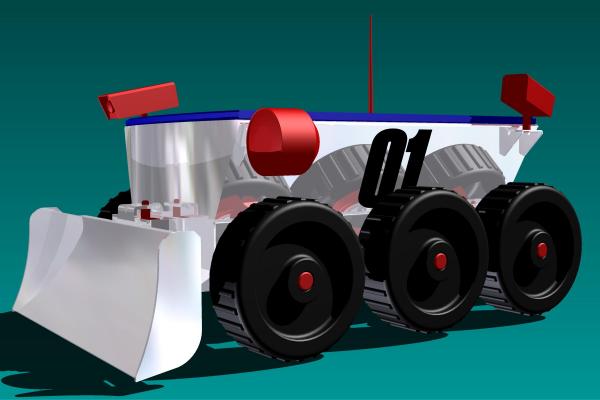
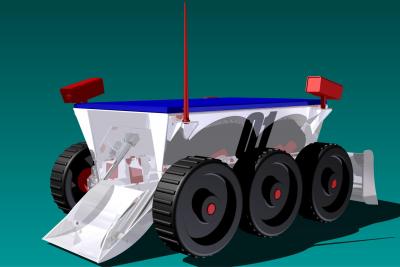
A ballaszt tartályt egy fenéklemezes ürítési megoldással készítettük el. A munkavégző oldalt (tolólappal szerelve) különválasztottuk az önsúlyozó oldaltól mert a kettős unkció műszakilag nem működhet. Egyértelművé vált, hogy a meghajtás ily módon átalakul. A jobb súlyelosztás lehetősége végett hat kerékkel szereltük fel a robotot. Ennek a következtében jutottunk el a jelen megoldásokhoz.
A projekt eredeti publikációja a NASA Lunar and Planetary Institute oldalán IDE KATTINTVA megtekinthető!
A publikáció magyarul IDE KATTINTVA megnyitható!
![]()
![]()
 RgStúdió
RgStúdió Magicon
Magicon